Mathematical Background
-
- Maps:
- We reserve the term map to refer to vector-valued functions. That is, maps are functions which return more than a single value.
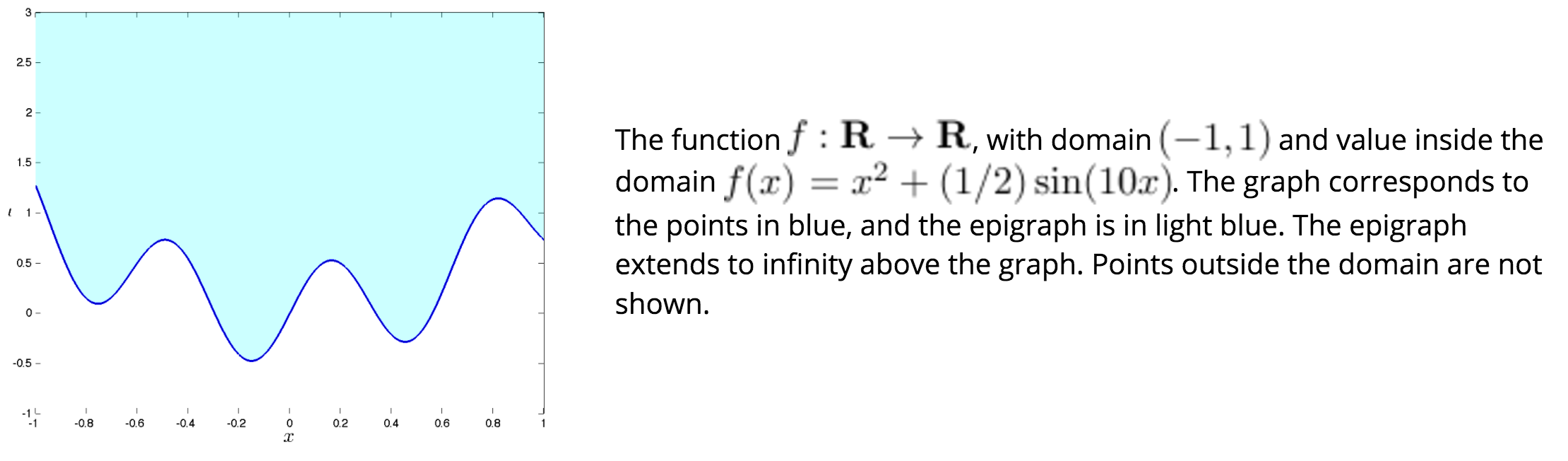
- Graph:
Consider a function \(f : \mathbf{R}^n \rightarrow \mathbf{R}\).
The graph of \(f\) is the set of input-output pairs that \(f\) can attain, that is: \(G(f) := \left \{ (x,f(x)) \in \mathbf{R}^{n+1} : x \in \mathbf{R}^n \right \}.\)
It is a subset of \(\mathbf{R}^{n+1}\).
- Epigraph:
Consider a function \(f : \mathbf{R}^n \rightarrow \mathbf{R}\).
The epigraph, denoted \(\mathop{\bf epi} f\), describes the set of input-output pairs that \(f\) can achieve, as well as “anything above”:
\(\mathop{\bf epi} f := \left \{ (x,t) \in \mathbf{R}^{n+1} ~:~ x \in \mathbf{R}^n, \ \ t \ge f(x) \right \}.\)epi in Greek means “above”
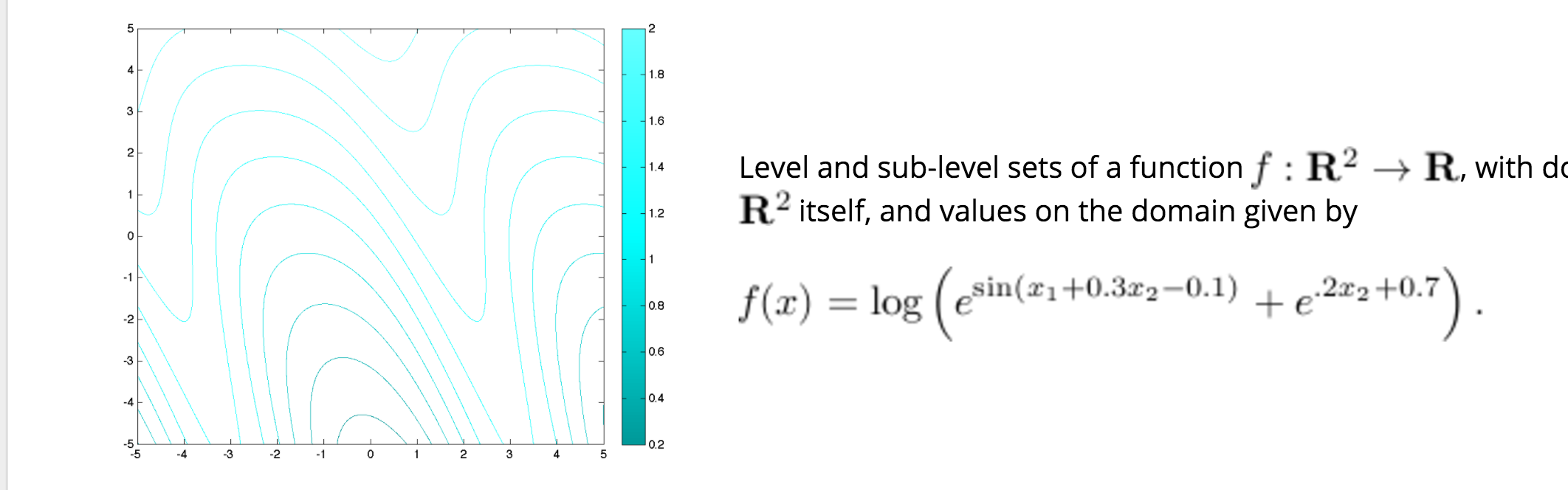
- Level and Sub-level Sets:
Level and sub-level sets correspond to the notion of contour of a function. Both are indexed on some scalar value \(t\).
-
Level sets: is simply the set of points that achieve exactly some value for the function \(f\).
For \(t \in \mathbf{R}\), the \(t-\)level set of the function \(f\) is defined as:
\(\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{L}_t(f) := \left\{ x \in \mathbf{R}^{n} ~:~ x \in \mathbf{R}^n, \ \ t = f(x) \right \}.\) -
Sub-level sets: is the set of points that achieve at most a certain value for \(f\), or below:
\(\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{S}_t(f) := \left\{ x \in \mathbf{R}^{n} ~:~ x \in \mathbf{R}^n, \ \ t \ge f(x) \right\}.\)
-
Mathematical Formulation [Standard Forms]
-
- Functional Form:
- An optimization problem is a problem of the form
\(p^\ast := \displaystyle\min_x f_0(x) : f_i(x) \le 0, \ \ i=1,\ldots, m\),
where:-
\(x \in \mathbf{R}^n\) is the decision variable;
-
\(f_0 : \mathbf{R}^n \rightarrow \mathbf{R}\) is the objective function, or cost;
-
\(f_i : \mathbf{R}^n \rightarrow \mathbf{R}, \ \ i=1, \ldots, m\) represent the constraints;
-
\(p^\ast\) is the optimal value.
-
-
- Epigraph form:
- TODO
-
- Other Standard-Forms:
- TODO