Table of Contents
Point-Set Topology
-
- Open Set:
- A set \(\chi \subseteq \mathbf{R}^n\) is said to be open if for any point \(x \in \chi\) there exist a ball centered in \(x\) which is contained in \(\chi\).
- Precisely, for any \(x \in \mathbf{R}^n\) and \(\epsilon > 0\) define the Euclidean ball of radius \(r\) centered at \(x\):
- \[B_\epsilon(x) = {z : \|z − x\|_2 < \epsilon}\]
- Then, \(\chi \subseteq \mathbf{R}^n\) is open if
- \[\forall x \: \epsilon \: \chi, \:\: \exists \epsilon > 0 : B_\epsilon(x) \subset \chi .\]
- Equivalently,
-
- A set \(\chi \subseteq \mathbf{R}^n\) is open if and only if \(\chi = int\; \chi\).
-
- An open set does not contain any of its boundary points.
-
- A closed set contains all of its boundary points.
-
- Unions and intersections of open (resp. closed) sets are open (resp. closed).
-
- Closed Set:
- A set \(\chi \subseteq \mathbf{R}^n\) is said to be closed if its complement \(\mathbf{R}^n \text{ \ } \chi\) is open.
-
- Interior of a Set:
- The interior of a set \(\chi \subseteq \mathbf{R}^n\) is defined as
- \[int\: \chi = \{z \in \chi : B_\epsilon(z) \subseteq \chi, \:\: \text{for some } \epsilon > 0 \}\]
-
- Closure of a Set:
- The closure of a set \(\chi \subseteq \mathbf{R}^n\) is defined as
- \[\bar{\chi} = \{z ∈ \mathbf{R}^n : \: z = \lim_{k\to\infty} x_k, \: x_k \in \chi , \: \forall k\},\]
-
i.e., the closure of \(\chi\) is the set of limits of sequences in \(\chi\).
-
- Boundary of a Set:
- The boundary of X is defined as
- \[\partial \chi = \bar{\chi} \text{ \ } int\: \chi\]
-
- Bounded Set:
- A set \(\chi \subseteq \mathbf{R}^n\) is said to be bounded if it is contained in a ball of finite radius, that is if there exist \(x \in \mathbf{R}^n\) and \(r > 0\) such that \(\chi \subseteq B_r(x)\).
-
- Compact Set:
- A set \(\chi \subseteq \mathbf{R}^n\) is compact \(\iff\) it is Closed and Bounded.
-
- Relative Interior [\(\operatorname{relint}\)]:
- We define the relative interior of the set \(\chi\), denoted \(\operatorname{relint} \chi\), as its interior relative to \(\operatorname{aff} C\):
- \[\operatorname{relint} \chi = \{x \in \chi : \: B(x, r) \cap \operatorname{aff} \chi \subseteq \chi \text{ for some } r > 0\},\]
- where \(B(x, r) = \{y : ky − xk \leq r\}\), the ball of radius \(r\) and center \(x\) in the norm \(\| · \|\).
-
- Relative Boundary:
- We can then define the relative boundary of a set \(\chi\) as \(\mathbf{cl} \chi \text{ \ } \operatorname{relint} \chi,\) where \(\mathbf{cl} \chi\) is the closure of \(\chi\).
Sets Combinations and Hulls
-
- Lines and Line Segments [Linear Sets]:
- Suppose \(x_1 \ne x_2\) are two points in \(\mathbf{R}^n\)
- Points of the form,
- \(y = \theta x_1 + (1 − \theta)x_2\),
- where, \(\theta \in \mathbf{R}\), form the line passing through \(x_1\) and \(x_2\).
- The parameter value \(\theta = 0\) corresponds to \(y = x_2\), and the parameter value \(\theta = 1\) corresponds to \(y = x_1\).
- Values of the parameter \(\theta\) between 0 and 1 correspond to the (closed) line segment between \(x_1\) and \(x_2\).
-
- Affine Sets:
- An affine set is a translation of a subspace — it is “flat” but does not necessarily pass through 0, as a subspace would.
(Think for example of a line, or a plane, that does not go through the origin.)
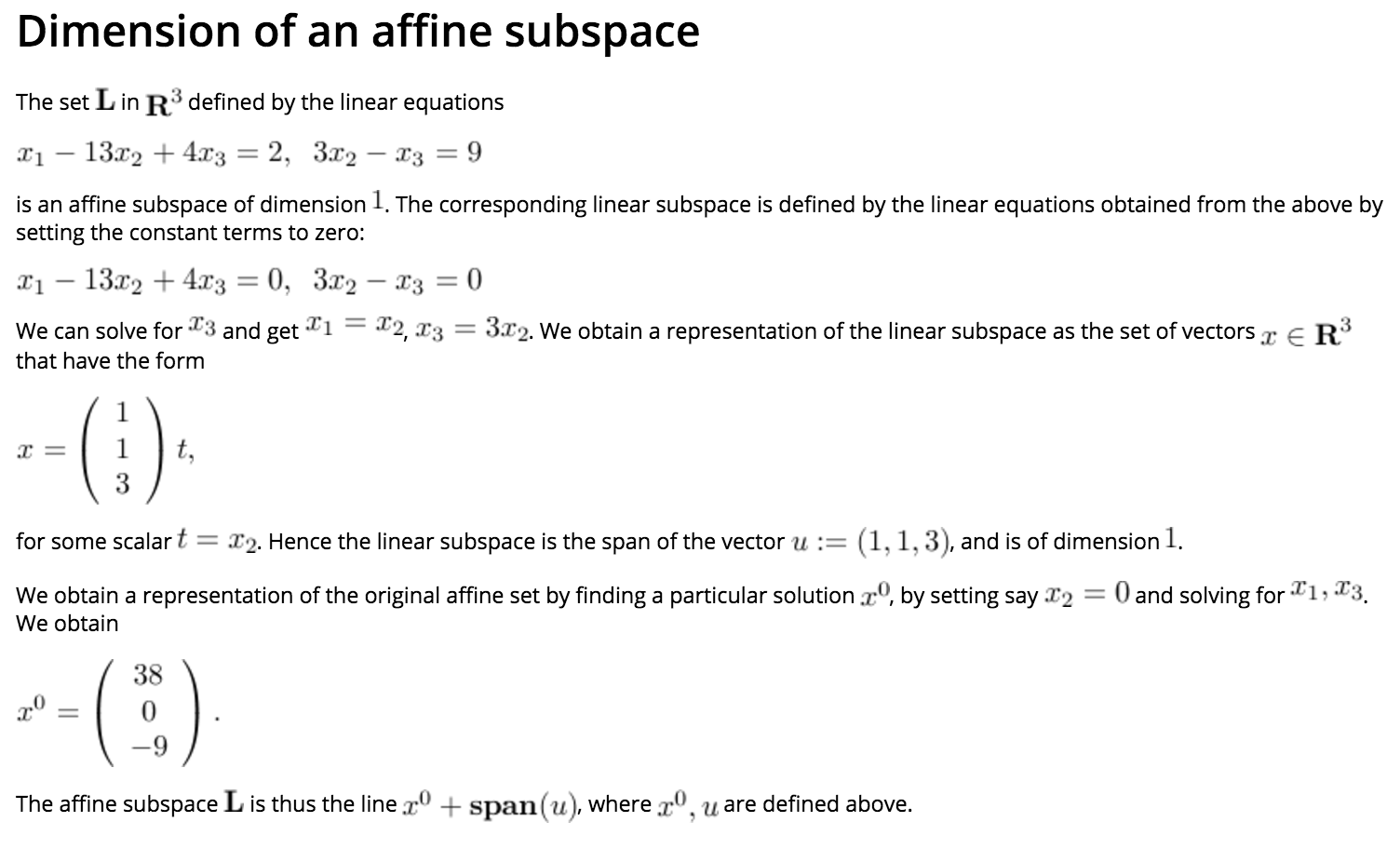
- An affine set \(\mathbf{A}\) can always be represented as the translation of the subspace spanned by some vectors:
- \(\mathbf{A} = \left\{ x_0 + \sum_{i=1}^m \lambda_i x_i ~:~ \lambda \in {\mathbf{R}}^m \right\}\ \ \\), for some vectors \(x_0, x_1, \ldots, x_m.\)
-
(Special case) lines: When \(\mathbf{S}\) is the span of a single non-zero vector, the set \(\mathbf{A}\) is called a line passing through the point \(x_0\). Thus, lines have the form \(\left\{ x_0 + tu ~:~ t \in \mathbf{R} \right\}\),
where \(u\) determines the direction of the line, and \(x_0\) is a point through which it passes. -
-
- Cones [Cone Sets]:
- A set \(C\) is a cone if \(x \in C\), then \(\alpha x \in C\), for every \(\alpha \geq 0\).
- A set C is said to be a convex cone if it is convex and it is a cone.
The conic hull of a set is a convex cone.
-
- Linear Combination:
- A Linear Combination is an expression constructed from a set of terms by multiplying each term by a constant and adding the results.
- \[\sum_{i=1}^n \lambda_i x_i\]
-
- Affine Combination:
- An Affine Combination of the points is a special type of linear combination, in which the coefficients \(\lambda_i\) are restricted to sum up to one, that is
- \[\sum_{i=1}^n \lambda_i x_i \: : \:\: \sum_{i=1}^m \lambda_i = 1\]
-
Intuitively, a convex combination is a weighted average of the points, with weights given by the \(\lambda_i\) coefficients.
-
- Conical Combination:
- A Conical Combination of the points is a special type of linear combination, in which the coefficients \(\lambda_i\) are restricted to be nonnegative, that is:
- \[\sum_{i=1}^n \lambda_i x_i \: : \:\: \lambda_i \geq 0 \: \text{for all } i\]
-
- Convex Combination:
- A Convex Combination of the points is a special type of linear combination, in which the coefficients \(\lambda_i\) are restricted to be nonnegative and to sum up to one, that is
- \[\lambda_i \geq 0 \: \text{for all } i, \: \text{ and } \sum_{i=1}^m \lambda_i = 1\]
-
Intuitively, a convex combination is a weighted average of the points, with weights given by the \(\lambda_i\) coefficients.
-
- Linear Hull:
- Given a set of points (vectors) \(\in \mathbf{R}^n:\)
- \[P = \{x^{(1)} , . . . , x^{(m)} \},\]
- The linear hull (subspace) generated by these points is the set of all possible linear combinations of the points:
- \[x=\lambda_1x^{(1)} + \cdots + \lambda_mx^{(m)}, \:\: \text{for } \lambda_i \in \mathbf{R}, \: i \in \{1, \cdots, m\}\]
-
- Affine Hull:
- The affine hull, \(\operatorname{aff}\: P\), of \(P\) is the set generated by taking all possible linear combinations of the points in \(P\), under the restriction that the coefficients \(\lambda_i\) sum up to one, that is \(\sum_{i=1}^m \lambda_i = 1\).
- \(\operatorname{aff}\: P\) is the smallest affine set containing \(P\).
-
- Props.
- It is the smallest affine set containing \(\chi\).
- or, The intersection of all affine sets containing \(\chi\).
- \[{\displaystyle \mathrm {aff} (\mathrm {aff} (S))=\mathrm {aff} (S)}\]
- \({\mathrm{aff}}(S)\) is a closed set
- \[{\displaystyle \mathrm {aff} (S+F)=\mathrm {aff} (S)+\mathrm {aff} (F)}\]
- Affine Hull is bigger than or equal to the convex hull.
- The linear span of \(\chi\) contains the affine hull of \(\chi\).
- Props.
-
- Examples:
- The affine hull of a singleton (a set made of one single element) is the singleton itself.
- The affine hull of a set of two different points is the line through them.
- The affine hull of a set of three points not on one line is the plane going through them.
- The affine hull of a set of four points not in a plane in \(\mathbf{R}^3\) is the entire space \(\mathbf{R}^3\).
- Examples:
-
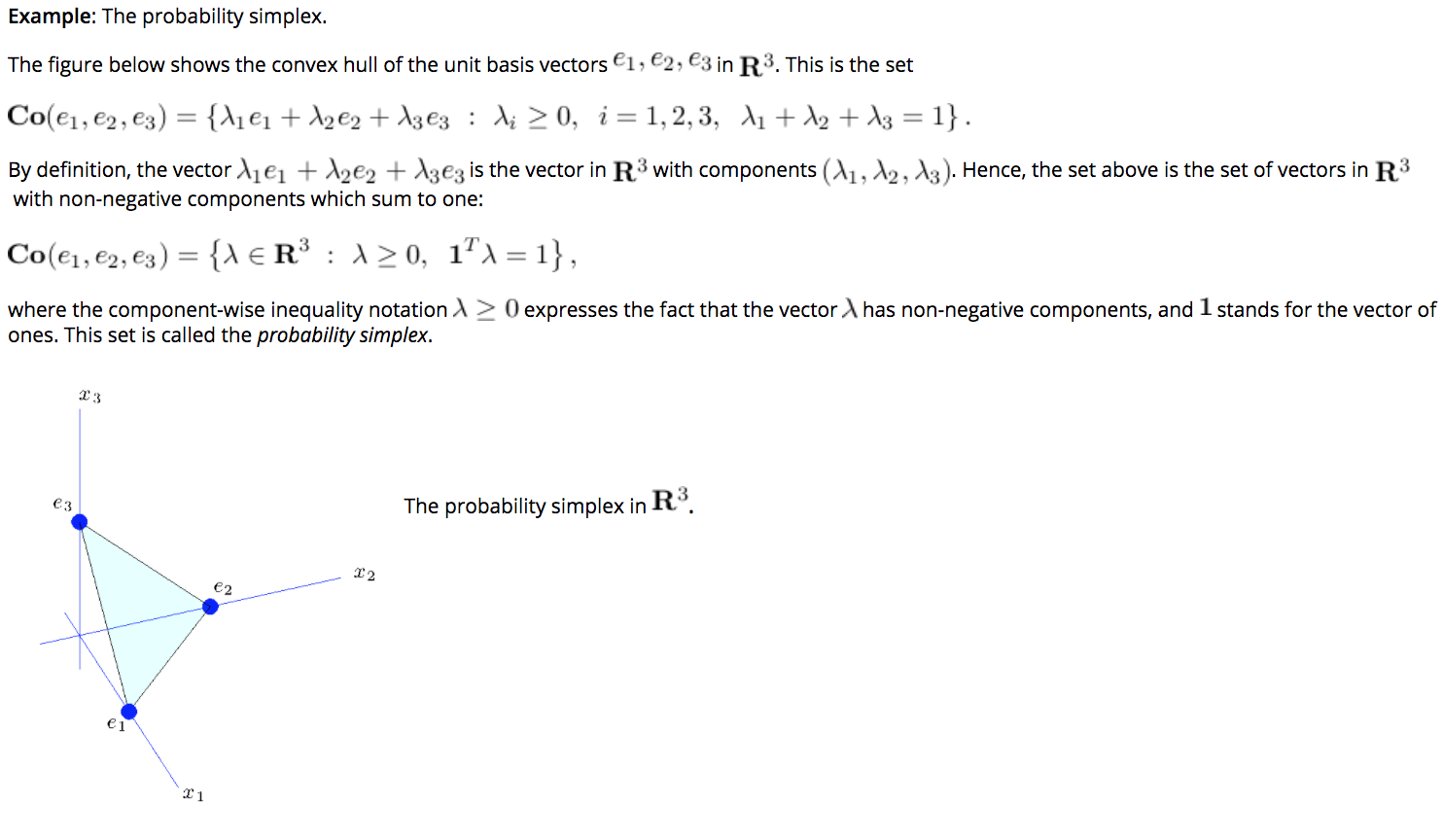
- Convex Hull:
- The set of all possible convex combination is called the convex hull of the point set \(\chi\) in the Euclidean plane or in a Euclidean space (or, more generally, in an affine space over the reals) is the smallest convex set that contains \(\chi\):
- \[\mathbf{conv} (x^{(1)}, \cdots, x^{(m)}) = \left\{\sum_{i=1}^m \lambda_i x^{(i)} : \: \lambda_i \geq 0, \: i \in \{1, \cdots, m\}; \:\: \sum_{i=1}^m \lambda_i = 1\right\}\]
-
- Props.
- The convex hull of the given points is identical to the set of all their convex combinations.
- It is the intersection of all convex sets containing \(\chi\).
- or, The set of all convex combinations of points in \(\chi\).
- or, The (unique) minimal convex set containing \(\chi\).
- or, The union of all simplices with vertices in \(\chi\).
- The algorithmic problem of finding the convex hull of a finite set of points in the plane or other low-dimensional Euclidean spaces is one of the fundamental problems of computational geometry.
- The convex hull of a finite point set \({\displaystyle S\subsetneq \mathbb {R} ^{n}}\) forms a convex polygon when \(n = 2\),
- or more generally a convex polytope in \({\displaystyle \mathbb {R} ^{n}}\).
- Props.
-
- Conic Hull:
- The set of all possible conical combinations is called the conic hull of the point set:
- \[\mathbf{conic} (x^{(1)}, \cdots, x^{(m)}) = \left\{\sum_{i=1}^m \lambda_i x^{(i)} : \: \lambda_i \geq 0, \: i \in \{1, \cdots, m\} \right\}\]
-
- Props.
- The conical hull of a set \(\chi\) is a convex set.
- In fact, it is the intersection of all convex cones containing \(\chi\) plus the origin.
- If \(\chi\) is a compact set (in particular, when it is a finite non-empty set of points), then the condition “plus the origin” is unnecessary.
- If we discard the origin, we can divide all coefficients by their sum to see that a conical combination is a convex combination scaled by a positive factor.
- Conical combinations and hulls may be considered as convex combinations and convex hulls in the projective space.
- The conic hull of a closed set is not, even, necessarily a closed set.
- While the convex hull of a compact set is a compact set as well, this is not so for the conical hull: the latter is Unboudned.
- Props.
Convex Set
-
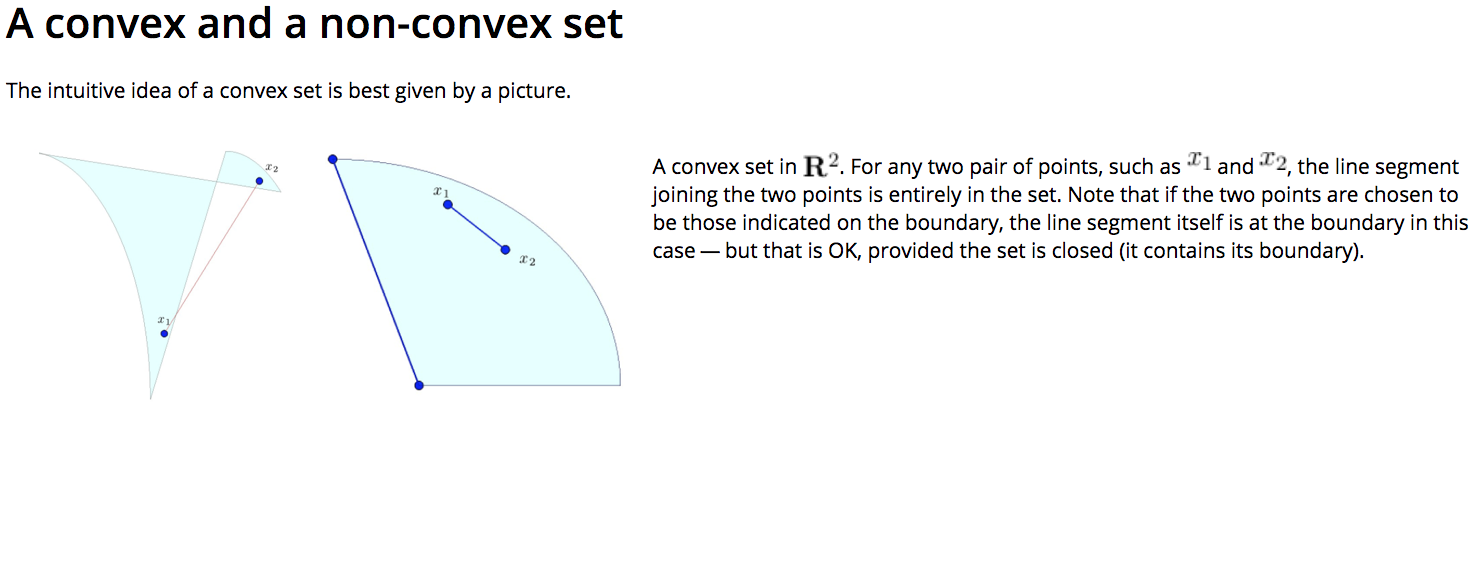
- Convex Set:
- A subset \(\mathbf{C}\) of \(\mathbf{R}^n\) is said to be convex if and only if it contains the line segment between any two points in it:
- \[\forall : x_1, x_2 \in \mathbf{C}, \;\; \forall : \lambda \in [0,1] \::\: \lambda x_1 + (1-\lambda) x_2 \in \mathbf{C}\]
-
- Strictly Convex Set:
- A set C is said to be strictly convex if it is convex, and
- \[x_1 \ne x_2 \in C, \: \lambda \in (0, 1) \implies \lambda x_1 + (1 − \lambda)x_2 \in \mathbf{relint} C\]
-
- Strongly Convex:
- A function \(f: \mathbf{R}^n \rightarrow \mathbf{R}\) is strongly convex if there exist a \(m > 0\) such that \(\tilde{f}(x) = f(x) − \dfrac{m}{2}\|x\|_2^2\) is convex, that is if
- \[f(\theta x + (1-\theta) y) \leq \theta f(x) + (1-\theta) f(y) - \dfrac{m}{2}\theta(1-\theta) \|x-y\|_2^2\]
-
- Diminsion:
- The dimension d of a convex set \(C \subseteq \mathbf{R}^n\) is defined as the dimension of its affine hull.
- It can happen that \(d < n\).
e.g., \(C = \left\{x = \left[\alpha 0\right]^T : \; \alpha ∈ [0, 1]\right\}\) is a convex subset of \(\mathbf{R}^2\) , with affine dimension \(d = 1\).
Prominant Examples
-
- Convex Examples:
- Subspaces and affine sets, such as lines and hyperplanes are obviously convex, as they contain the entire line passing through any two points.
- Half-spaces are also convex.
-
-
-
-
-
Asynchronous: \
-
Asynchronous: \
- Asynchronous: \
Operators and Convexity
-
- Intersection:
- The intersection of a (possibly infinite) family of convex sets is convex. This property can be used to prove convexity for a wide variety of situations.
- Ex: An halfspace \(H = \{x \in \mathbf{R}^n : \: c^Tx \leq d\}, c \ne 0\) is a convex set. The intersection of \(m\) halfspaces \(H_i, i = 1, \cdots, m\), is a convex set called a polyhedron.
-
-
-
-
-
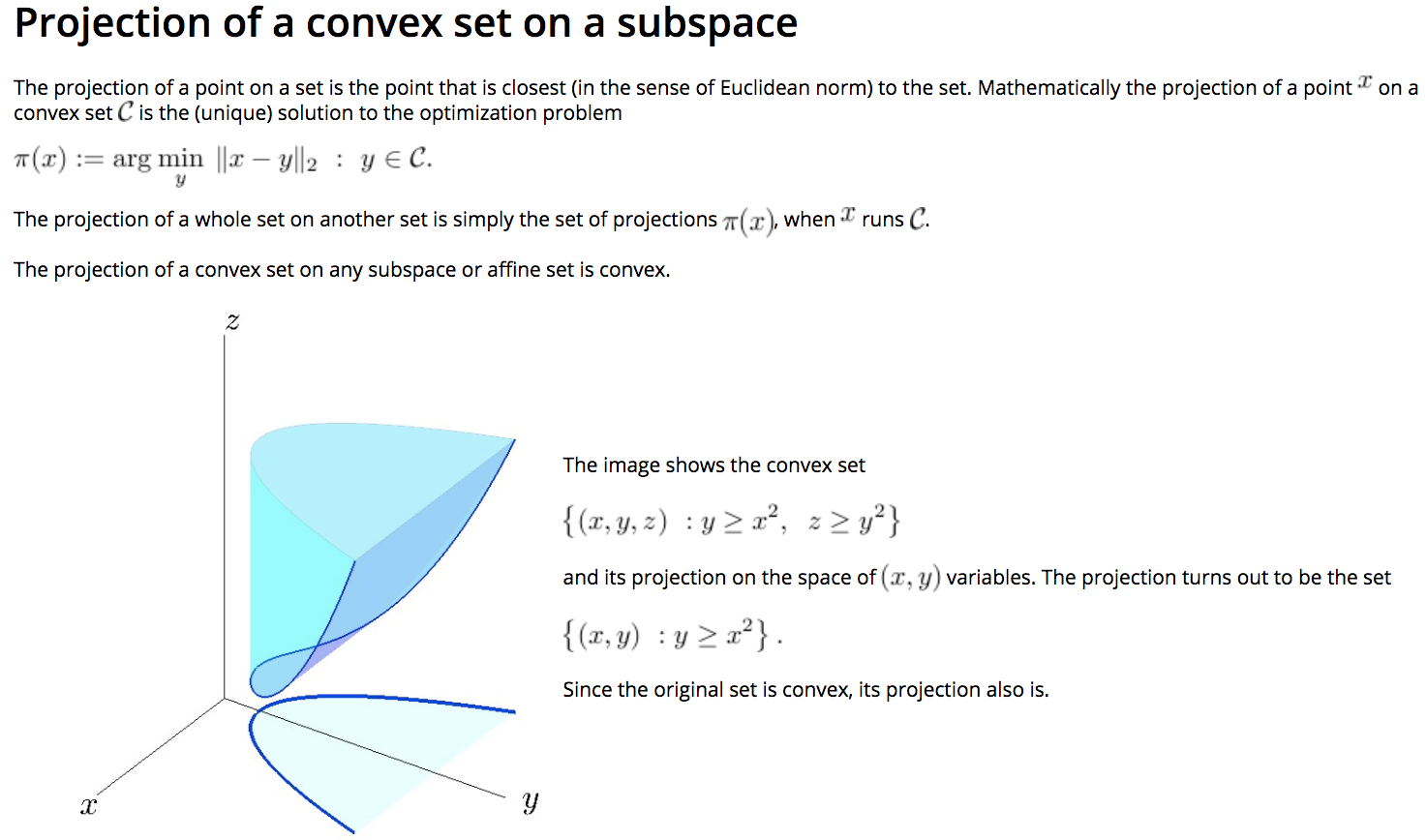
- Affine Transformation:
- If a map \(f \: \mathbf{R}^n \rightarrow \mathbf{R}^m\) is affine, and \(\mathbf{C}\) is convex, then the set
- \[f(\mathbf{C}) \: = \left\{ f(x) : \: x \in \mathbf{C} \right\}\]
- is convex.
In particular, the projection of a convex set on a subspace is convex.
-
-
-
- Composition w/ Affine Function:
- The composition with an affine function preserves convexity:
- If \(A \in \mathbf{R}^{m \times n}, b \in \mathbf{R}^m \text{ and } f : \mathbf{R}^m \rightarrow \mathbf{R}\)
- is convex, then the function \(g : \mathbf{R}^n \rightarrow \mathbf{R}\) with values \(g(x) = f(Ax+b)\) is convex.
-
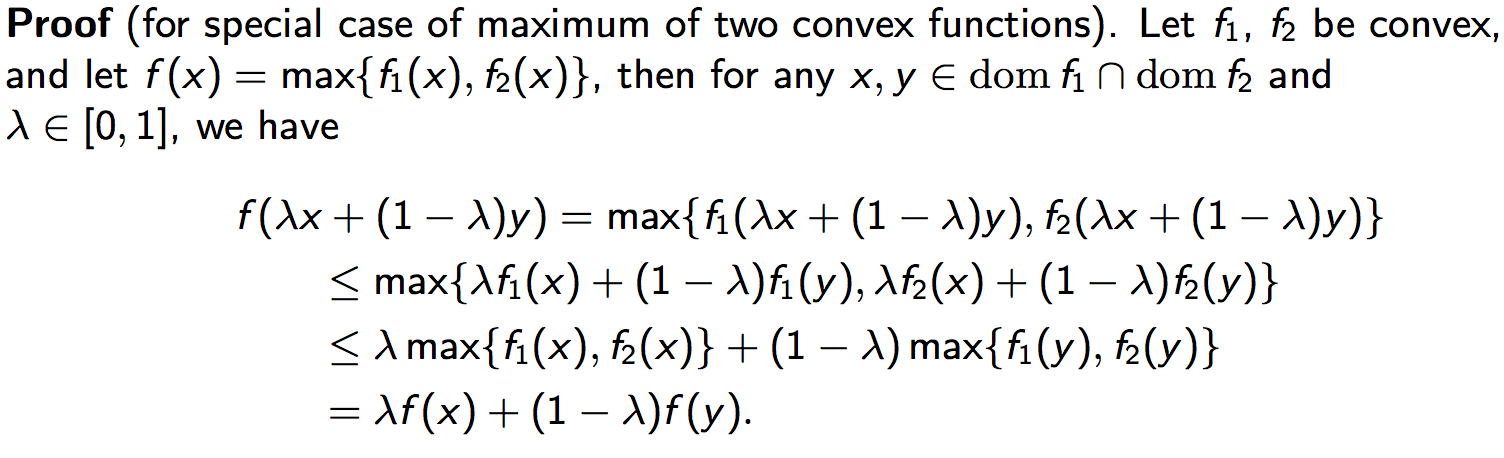
- Point-Wise Maximum:
- The pointwise maximum of a family of convex functions is convex:
- If \((f_\alpha)_{\alpha \in {\cal A}}\) is a family of convex functions index by \(\alpha\), then the function
- \[f(x) := \max_{\alpha \in {\cal A}} : f_\alpha(x)\]
- is convex.
-
-

-

-
- Nonnegative Weighted Sum:
- The nonnegative weighted sum of convex functions is convex.
-
-
-
- Partial Minimum:
- If \(f\) is a convex function in \(x=(y,z),\) then the function
- \[g(y) := \min_z \: f(y,z)\]
- is convex.
-
Note that joint convexity in \((y,z)\) is essential.
-
-
- Composition W/ Monotone Convex Functions.:
- The composition with another function does not always preserve convexity. However, if f = h circ g, with h,g convex and h increasing, then f is convex.
- Indeed, the condition \(f(x) \le t\) is equivalent to the existence of \(y\) such that
- \[h(y) \le t, \;\; g(x) \le y\]
- The condition above defines a convex set in the space of \((x,y,t)\)-variables.
- The epigraph of \(f\) is thus the projection of that convex set on the space of \((x,t)\)-variables, hence it is convex.
-
-
- Further Analysis:
- More generally, if the functions \(g_i : \mathbf{R}^n \rightarrow \mathbf{R}, i=1, \ldots, k\) are convex and \(h : \mathbf{R}^k \rightarrow \mathbf{R}\) is convex and non-decreasing in each argument, with \(\mathbf{dom}g_i = \mathbf{dom} h = \mathbf{R}\), then
- \[x \rightarrow (h \circ g)(x) \: = h(g_1(x), \ldots, g_k(x))\]
- is convex.
-
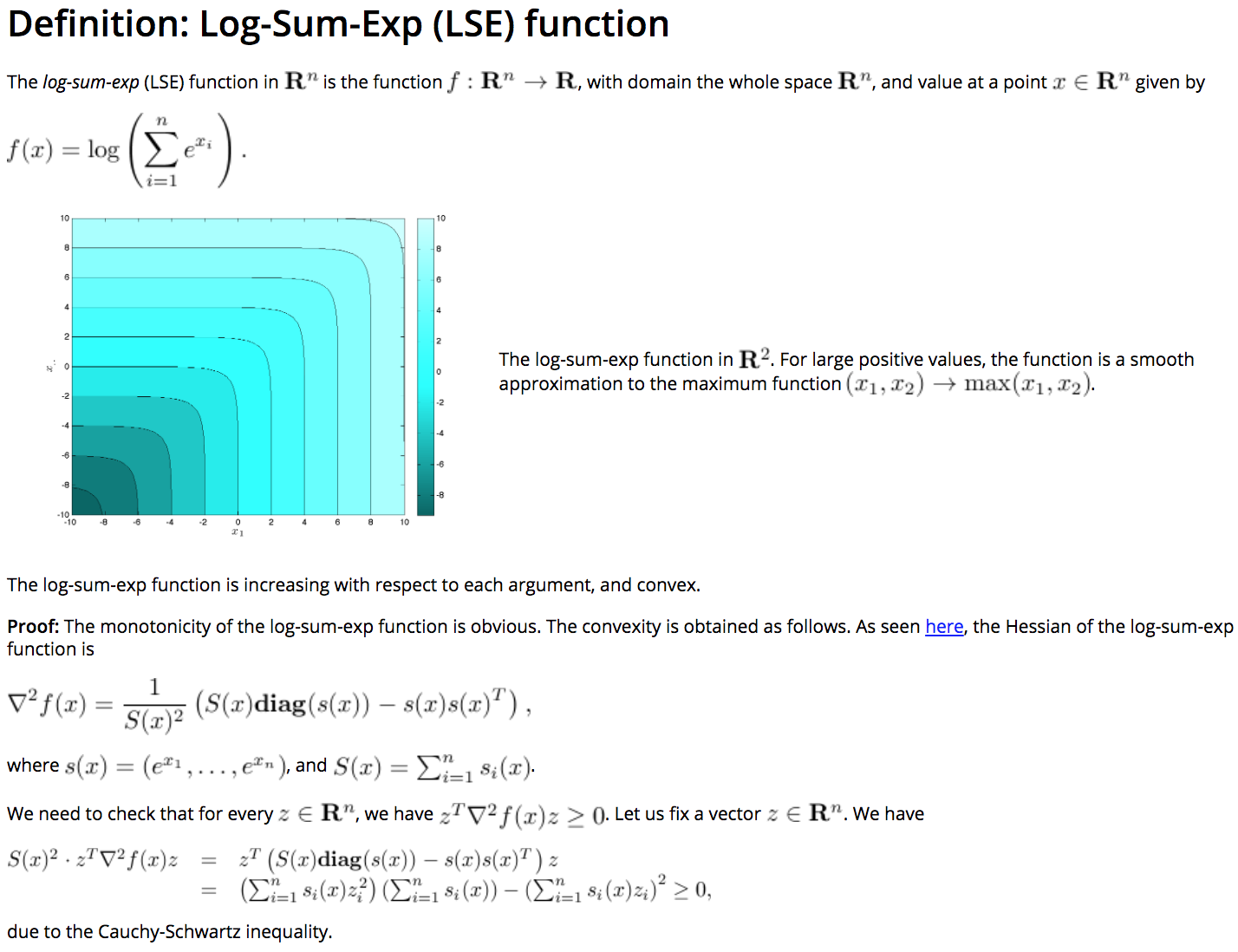
For example, if \(g_i\)’s are convex, then \(log \sum_i \exp{g_i}\) also is.
Seperation Theorems
-
- Theorem. Supporting Hyperplane:
- If \(\mathbf{C} \subseteq \mathbf{R}^n\) is convex and non-empty, then for any \(x_0\) at the boundary of \(\mathbf{C}\), there exist a supporting hyperplane to \(\mathbf{C}\) at \(x_0\),
meaning that there exist \(a \in \mathbf{R}^n, \: a \ne 0,\) such that \(a^T(x-x_0) \le 0\) for every \(x \in \mathbf{C}\). -
-
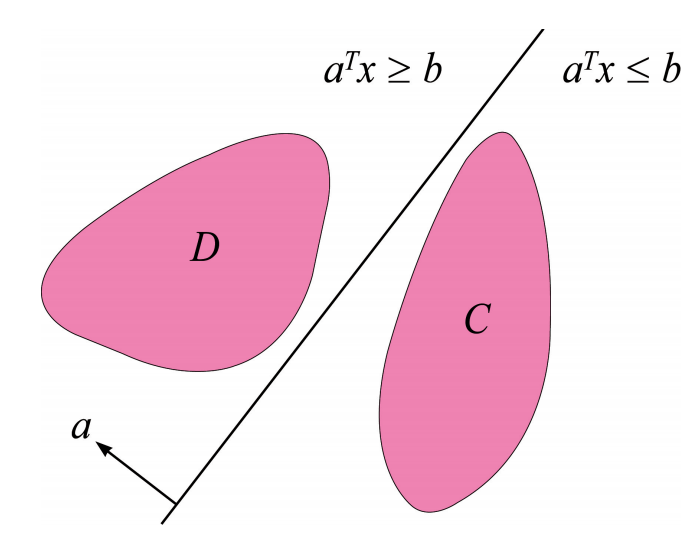
- Theorem. Separating Hyperplane:
- If \(\mathbf{C}, \mathbf{D}\) are two convex subsets of \(\mathbf{R}^n\) that do not intersect, then there is an hyperplane that separates them,
that is, \(\exists a \in \mathbf{R}^n, \: a \ne 0,\) and \(b \in \mathbf{R}\), such that \(a^Tx \le b\) for every \(x \in \mathbf{C}\), and \(a^Tx \ge b\) for every \(x \in \mathbf{D}\). - Equivalently,
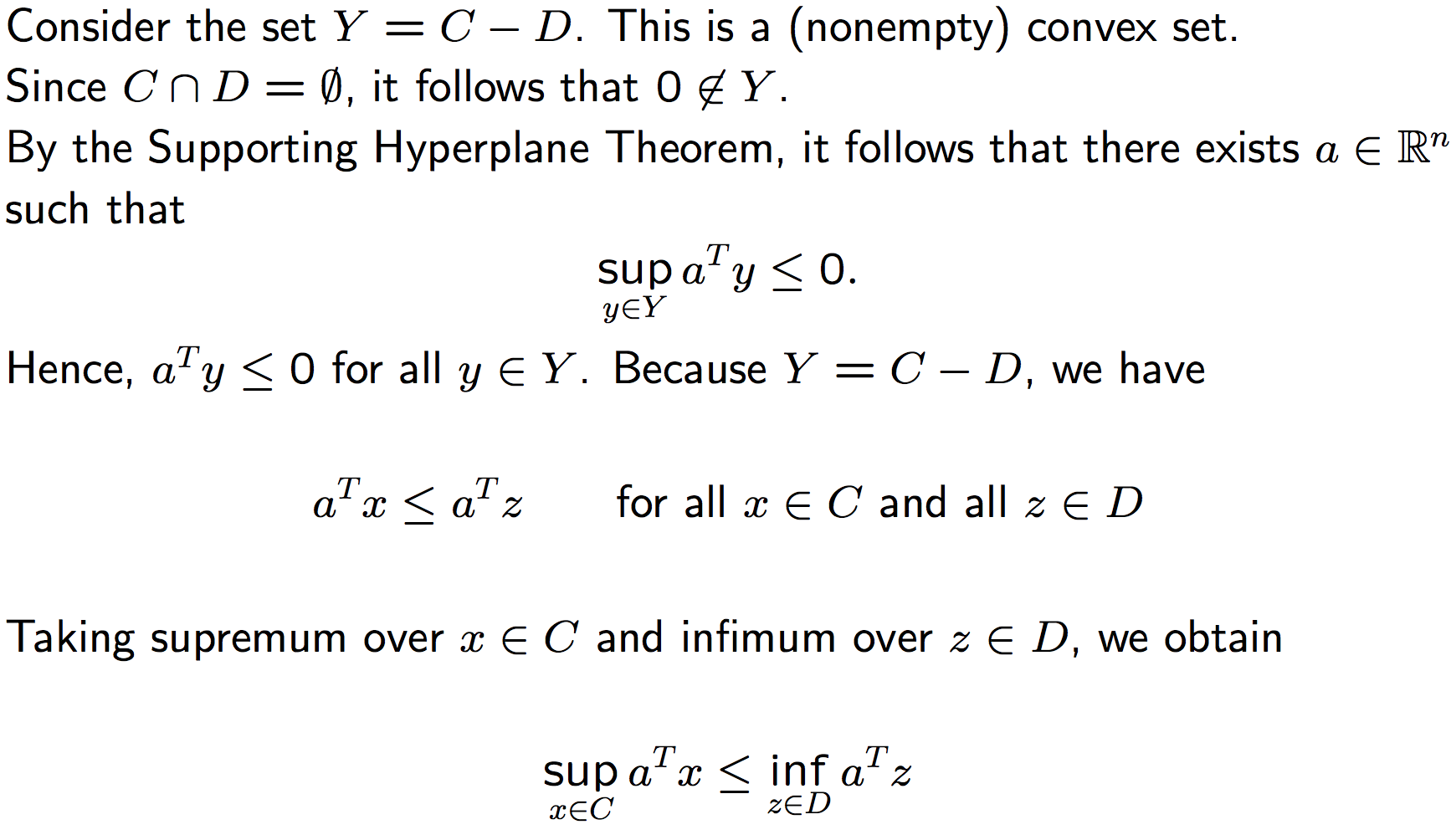
- Let C, D ⊆ Rn be nonempty convex disjoint sets i.e., \(C \cap D = \varnothing\).
- Then, there exists a hyperplane separating these sets, i.e.,
- \(\exists a \in \mathbf{R}^n, \: a \ne 0\), such that
- \[\sup_{x\in C} a^Tx \: \leq \: \sup_{z\in D}a^Tz\]
-
-
When two convex sets do not intersect, it is possible to find a hyperplane that separates them.
-
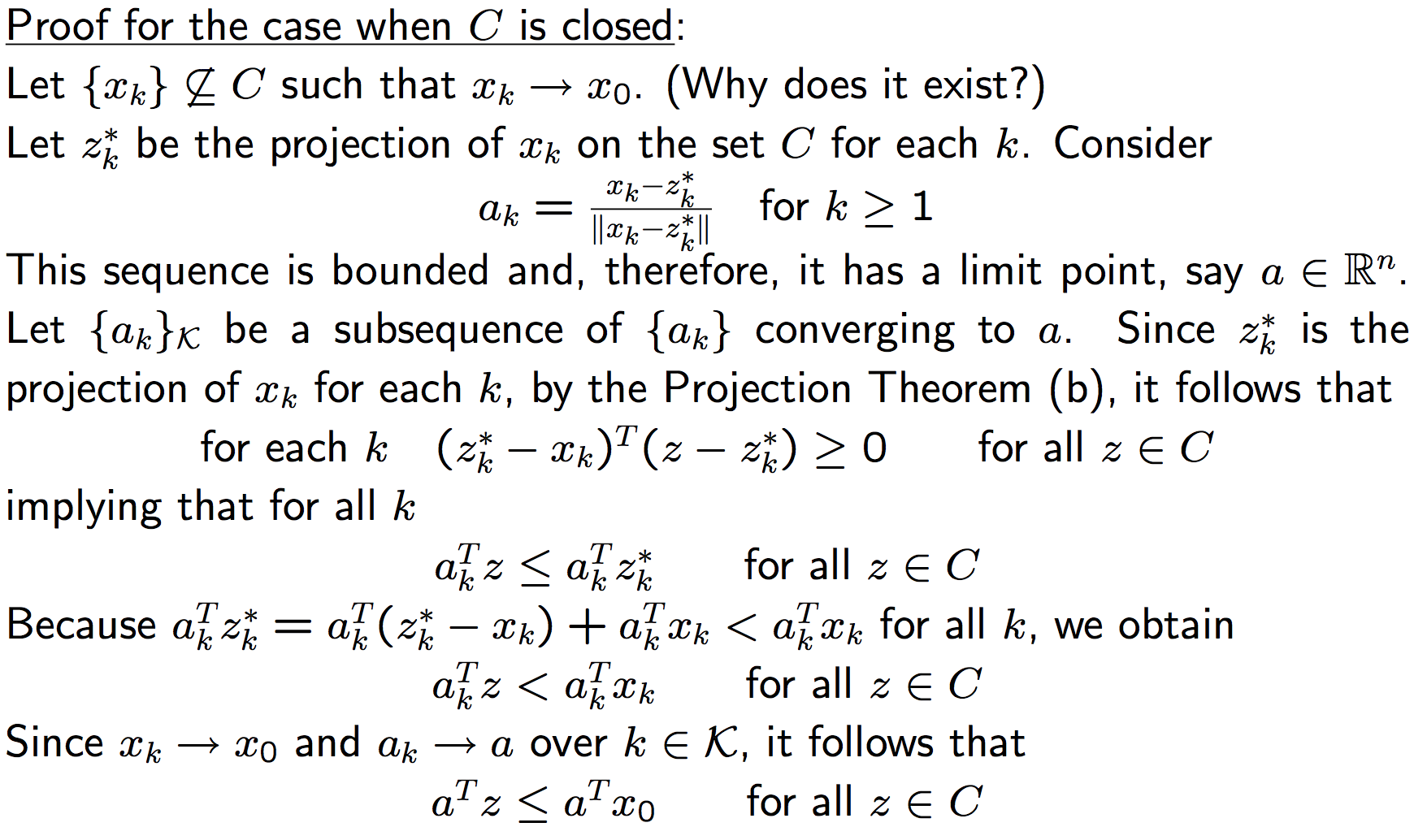
- Theorem. Strictly Separating Hyperplane:
- Let \(C, D \subseteq \mathbf{R}^n\) be nonempty convex disjoint sets.
- Assume that \(C − D\) is closed. Then, there exists a hyperplane strictly. separating the sets, i.e., \(\exists \: a \in \mathbf{R}^n, \: a \ne 0,\) such that
- \[\sup_{x\in C} a^Tx \: < \: \sup_{z\in D}a^Tz\]
-
When is \((C − D)\) closed?
One of conditions: \(C\) is closed and \(D\) is compact.
-
- Farkas lemma:
- Let \(A \in \mathbf{R}^{m \times n}\) and \(y \in \mathbf{R}^m\). Then, one and only one of the following two conditions is satisfied:
- The system of linear equations \(Ax = y\) admits a nonnegative solution \(x \geq 0\).
- There exist \(z \in \mathbf{R}^m\) such that \(z^TA \geq 0, \: z^Ty < 0\).
-
- Equivalent Formulation: statement (2) above implies the negation of statement (1), and vice versa. Thus, the following two statements are equivalent:
- There exist \(x \geq 0\) such that \(Ax = y\).
- \(z^Ty \geq 0, \:\: \forall z : \: z^TA \geq 0\).
- Equivalent Formulation: statement (2) above implies the negation of statement (1), and vice versa. Thus, the following two statements are equivalent:
-
- Interpretation in terms of systems of linear inequalities: Let \(a_i \in \mathbf{R}^m, i = 1, \cdots, n\), be the columns of \(A\), then
- \[y^Tz \geq 0, \forall z : a_i^Tz \geq 0, i = 1, \cdots, n\]
- if and only if there exist multipliers \(x_i \geq 0, i = 1, \cdots, n\) such that \(y\) is a conic combination of the \(a_i\)’s:
- \[\exists x_i \geq 0, i = 1, \cdots, m : \: y = a_1x_1 + \cdots + a_nx_n.\]
Convex Functions
-
- Domain:
- The domain of a function \(f: \mathbf{R}^n \rightarrow \mathbf{R}\) is the set \(\mathbf{dom} f \subseteq \mathbf{R}^n\) over which \(f\) is well-defined, in other words:
- \[\mathbf{dom} f \: = \{ x \in \mathbf{R}^n : \: -\infty < f(x) < +\infty\}.\]
-
- Convex Function:
- A function \(f : \mathbf{R}^n \rightarrow \mathbf{R}\) is convex if
- (1) Its domain \(\mathbf{dom} f\) is convex.
- (2) And, \(\forall \:\: x, y \in \mathbf{dom} f , \;\; \forall \theta \in [0,1] : \:\: f(\theta x + (1-\theta) y) \le \theta f(x) + (1-\theta) f(y).\)
-
Note that the convexity of the domain is required.
-
- Concave Function:
- A function \(f\) is concave if the function \(-f\) is convex.
-
- Convexity and the Epigraph:
- A function \(f : \mathbf{R}^n \rightarrow \mathbf{R}\), is convex if and only if, its epigraph,
- \[\mathbf{ epi } f \:= \: \left\{ (x,t) \in \mathbf{R}^{n+1} : \: t \ge f(x) \right\}\]
- is convex.
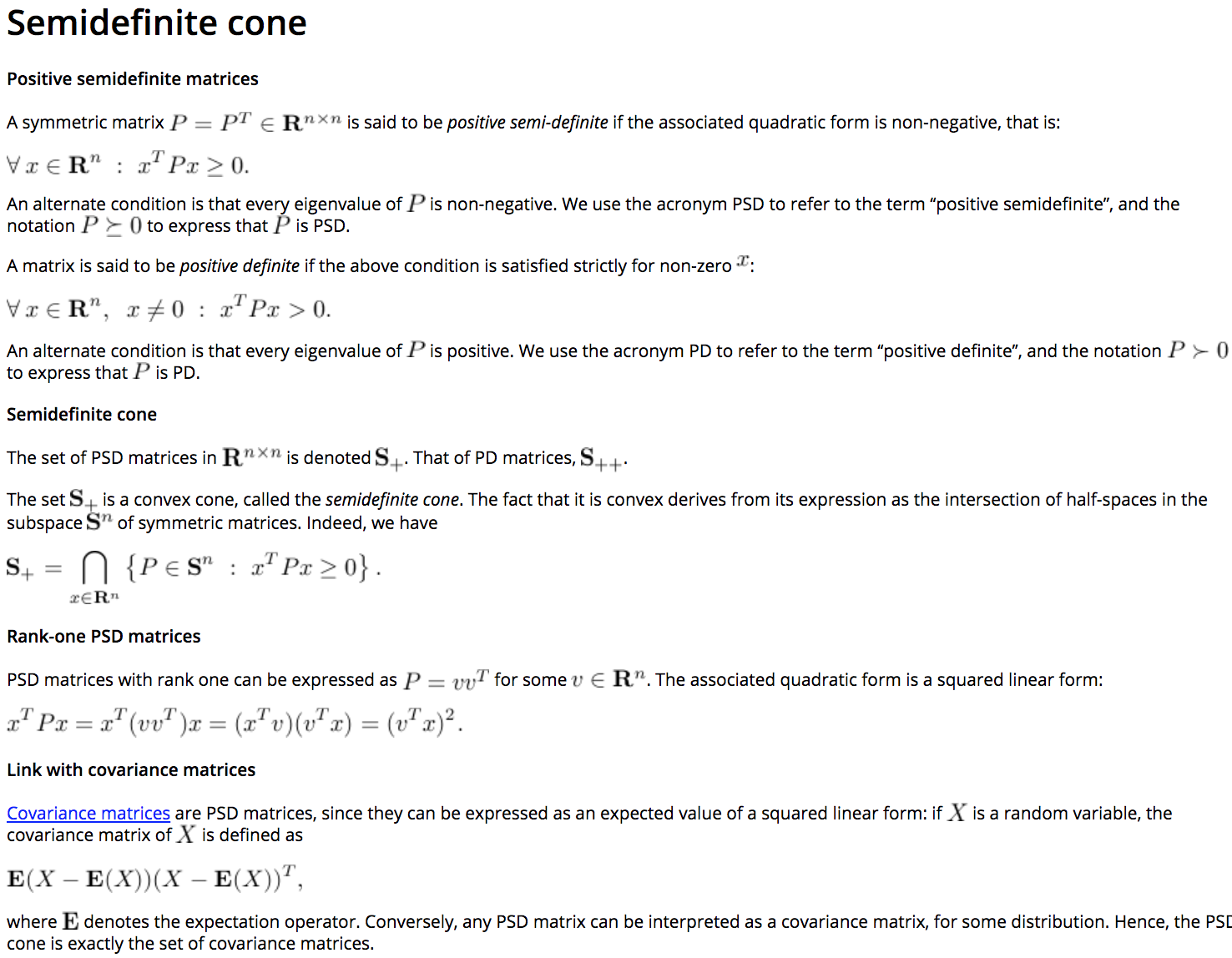
- Example: We can us this result to prove for example, that the largest eigenvalue function \(\lambda_{\rm max} : \mathcal{S}^n \rightarrow \mathbf{R}\), which to a given \(n \times n\) symmetric matrix \(X\) associates its largest eigenvalue, is convex, since the condition \(\lambda_{\rm max}(X) \le t\) is equivalent to the condition that \(t I - X \in \mathcal{S}_+^n\).
-
- First-order condition:
- If f is differentiable (that is, \(\mathbf{dom} f\) is open and the gradient exists everywhere on the domain), then \(f\) is convex if and only if
- \[\forall : x, y : \: f(y) \ge f(x) + \nabla f(x)^T(y-x) .\]
-
The geometric interpretation is that the graph of \(f\) is bounded below everywhere by anyone of its tangents.
-
-
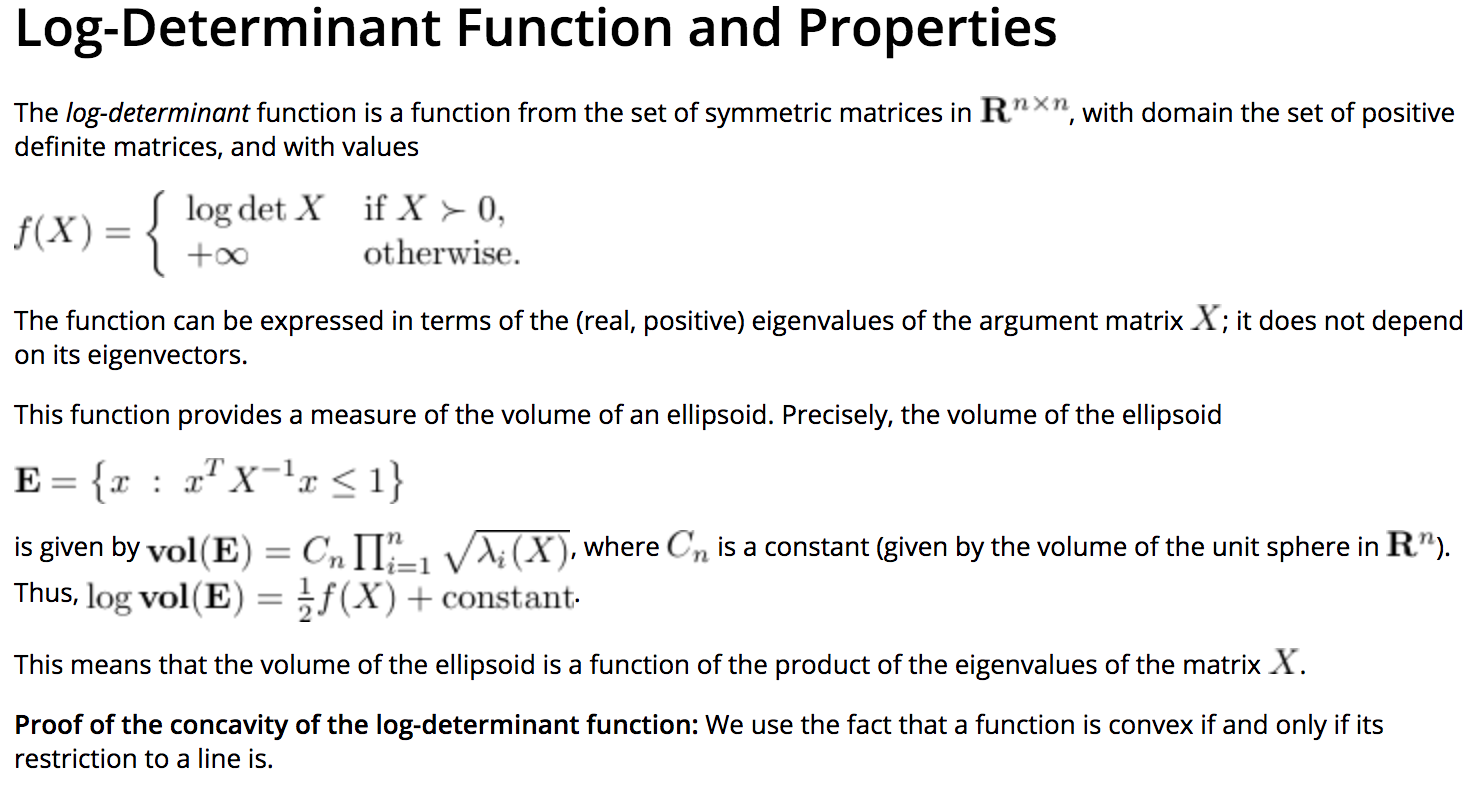
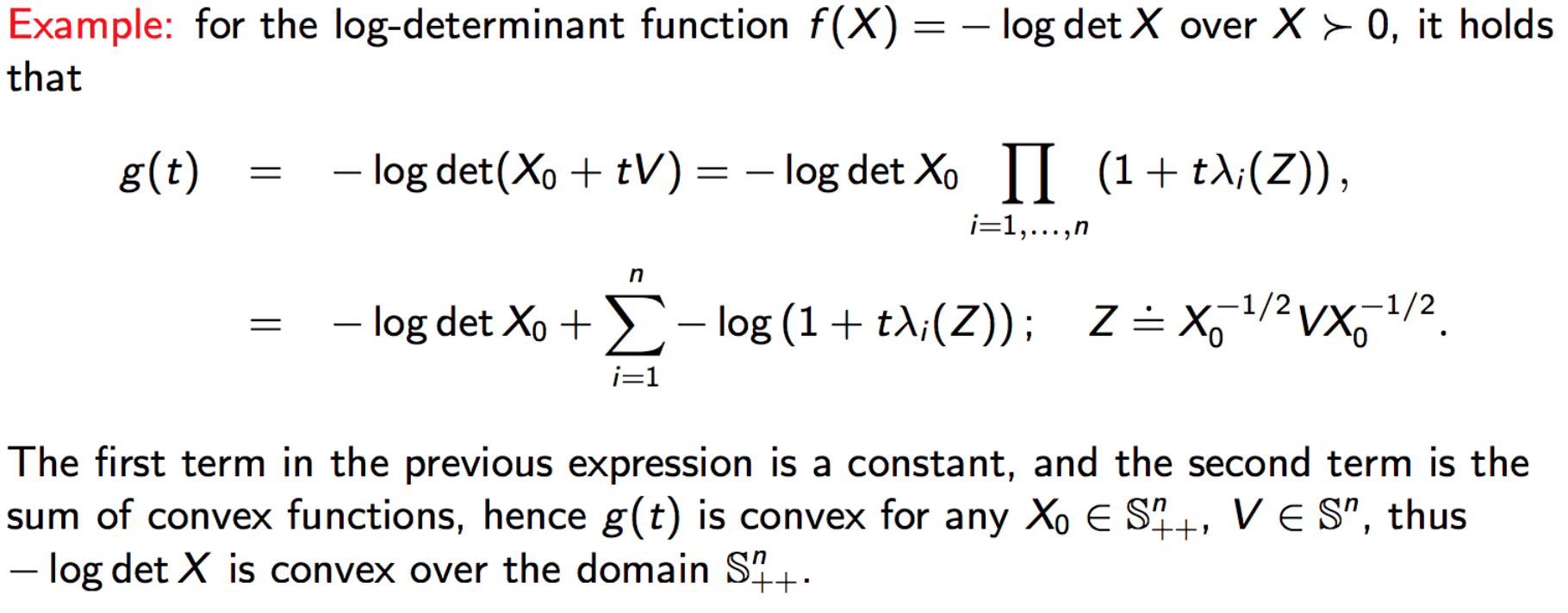
- Restriction to a line:
- The function \(f\) is convex if and only if its restriction to any line is convex, meaning that
- for every \(x_0 \in \mathbf{R}^n\), and \(v \in \mathbf{R}^n\), the function \(g(t) := f(x_0+tv)\) is convex.
- Note that the “if” part is a direct consequence of the “composition with an affine function” result below.
-
-
-
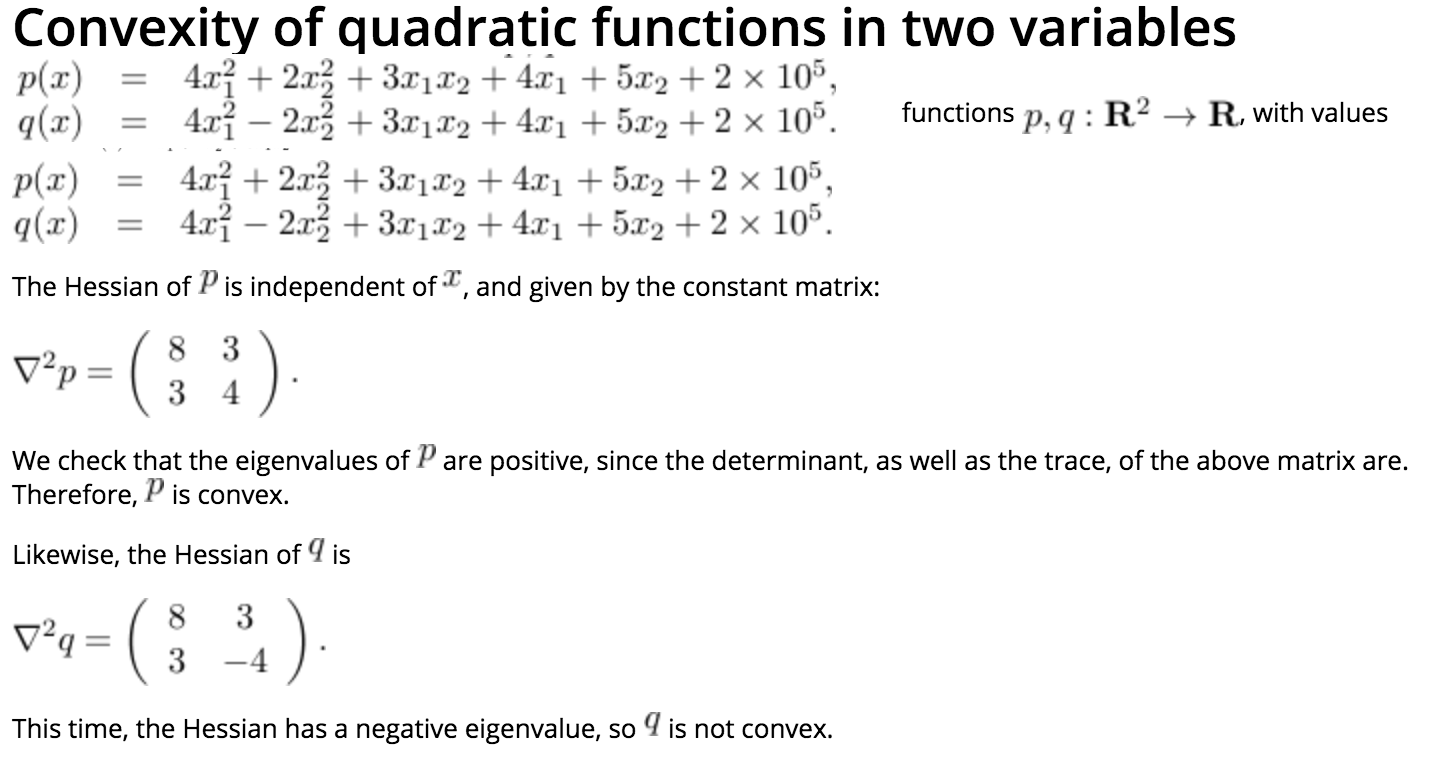
- Second-order Condition:
- If \(f\) is twice differentiable, then it is convex if and only if its Hessian \(\nabla^2 f\) is positive semi-definite everywhere on the domain of \(f\).
-
This is perhaps the most commonly known characterization of convexity.
- Also, If \(f\) is twice differentiable, then it is Strictly convex if and only if its Hessian \(\nabla^2 f\) is positive definite everywhere on the domain of \(f\).
- Finally, If \(f\) is twice differentiable, then it is Strongly convex if and only if its Hessian \(\nabla^2 f \succeq ml\), for some \(m > 0\) and for all \(x \in \mathbf{dom} f\).
-
-
-
-